
GA-TEB: Goal-Adaptive Framework for Efficient Navigation Based on Goal Lines
Focused on the crowd navigation, this work introduces the concept of goal lines, which extend the traditional local goal from a single point to multiple candidate lines. Coupled with a topological map construction strategy that groups obstacles to be as convex as possible, a goal-adaptive navigation framework is proposed to efficiently plan multiple candidate trajectories.
Feb 1, 2025
NavG: Risk-Aware Navigation in Crowded Environments Based on Reinforcement Learning with Guidance Points
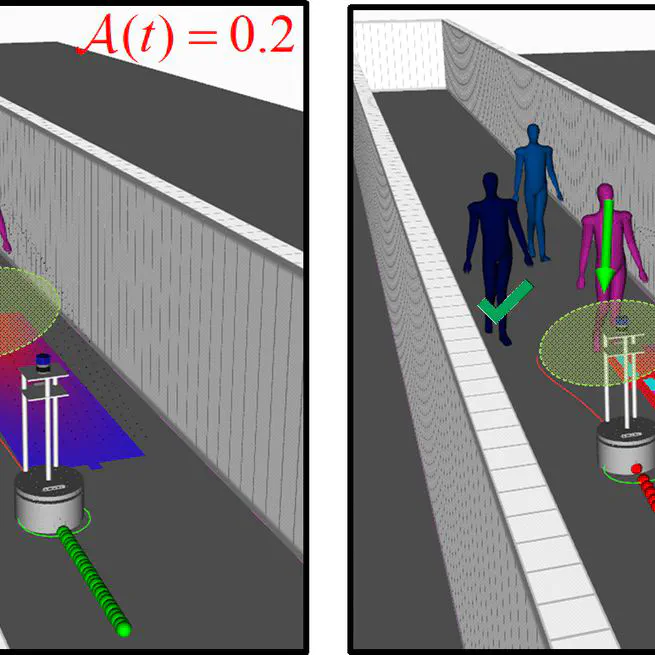
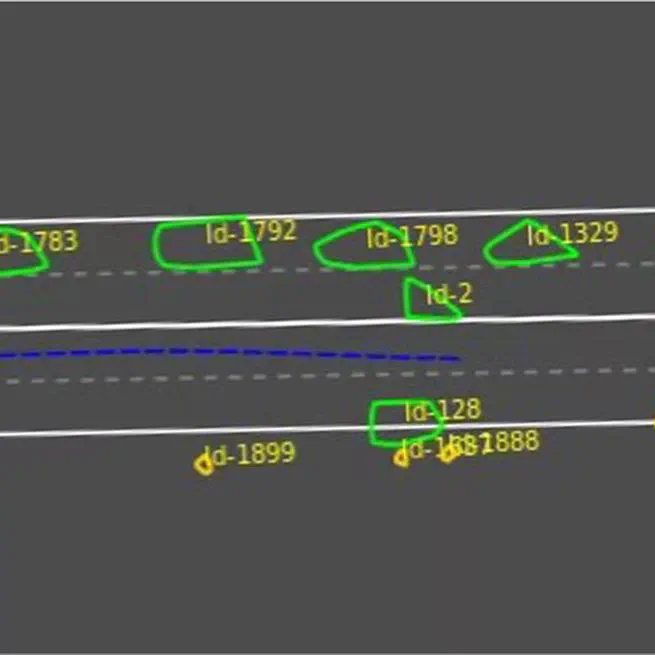
Motion planning in navigation systems is highly susceptible to upstream perceptual errors, particularly in human detection and tracking. To mitigate this issue, the concept of guidance points—a novel directional cue within a reinforcement learning-based framework—is introduced. A structured method for identifying guidance points is developed, consisting of obstacle boundary extraction, potential guidance point detection, and redundancy elimination. To integrate guidance points into the navigation pipeline, a perception- to-planning mapping strategy is proposed, unifying guidance points with other perceptual inputs and enabling the RL agent to effectively leverage the complementary relationships among raw laser data, human detection and tracking, and guidance points. Qualitative and quantitative simulations demonstrate that the proposed approach achieves the highest success rate and near-optimal travel times, greatly improving both safety and efficiency. Furthermore, real-world experiments in dynamic corridors and lobbies validate the robot’s ability to confidently navigate around obstacles and robustly avoid pedestrians.
Jan 1, 2025
CG3: The Human Gaze Helps Robots Run Bravely and Efficiently in Crowds
In human-aware navigation, the robot tacitly games with humans, balancing safety and efficiency according to human intentions. Poor balance or bad intent recognition causes the robot to stop conservatively or advance rashly, resulting in a deadlock or even a collision respectively. To address the issue, this paper proposes an improved limit cycle for collaboratively parameterizing human intentions and planning robot motions. The human-robot interaction is modeled as a dynamic chicken game with incomplete information, where the human gaze is introduced to depict the unique characteristics of each person, allowing the robot to approach with different safety margins. Our method is tested in challenging indoor scenarios and outperforms traditional methods in both safety and efficiency. We enable robots to utilize human wisdom to solve problems that cannot be solved on their own. The robot bravely goes through oncoming crowds by getting closer to people with higher attention on it and has the foresight to stably cross in front or behind people.
Jan 1, 2023
P2EG: Prediction and Planning Integrated Robust Decision-Making for Automated Vehicle Negotiating in Narrow Lane with Explorative Game
In the narrow lane scene of autonomous driving, it is critical for the ego car to recognize the intentions of social vehicles and cooperate with them. However, cooperating with social vehicles is challenging due to insufficient information. This paper proposes an Explorative Game that adopts Participant Game and Perfect Bayesian Equilibrium to exploratively perform some aggressive actions to obtain additional information, thus the autonomous vehicle can cooperate robustly and efficiently. Explorative Game assumes each vehicle maintains a unique belief about the current situation and attributes insecurity and instability to the conflict of various Perfect Bayesian Equilibriums formed by various beliefs. Aggressive actions enable the ego car to proactively guide social vehicles to cooperate as it expects and encourage them to express their intentions as quickly and clearly as possible so that the equilibriums can converge and the conflict can be eliminated. Additional information reduces the error between the actual intentions of social vehicles and the estimated intentions from the ego car, helping rationally prune potential interactions and update parameters of the reward function. We demonstrate our algorithm on recorded data as well as virtual environments with manually controlled social vehicles to prove the efficiency of cooperation and the robustness of decision-making. And it has been running for more than 20 kilometers in the real world.
Jan 1, 2022