GraphicTEB: Improve Computing Efficiency and Motion Safety by Analyzing Environment With Graphics
Jan 1, 2023· ,,,,·
0 min read
,,,,·
0 min read
Qianyi Zhang (Kenny)
Shichao Wu
Yuhang Jia
Yuang Xu
Jingtai Liu
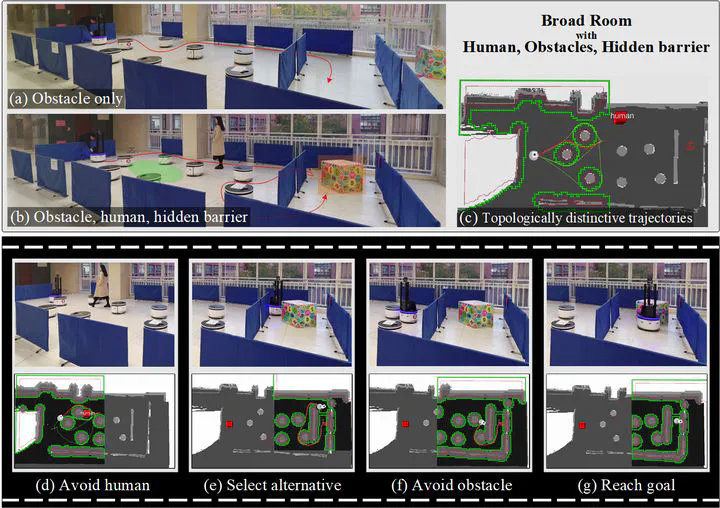 Image credit: Unsplash
Image credit: UnsplashAbstract
Exploring topologically distinctive trajectories provides more options for robot motion planning. Since computing time grows greatly with environment complexity, improving exploration efficiency and picking the optimal trajectory in complex environments are critical issues. To this end, this paper proposes a Graphic- and Timed-Elastic-Band-based approach (GraphicTEB) with spatial completeness and high computing efficiency. The environment is analyzed utilizing computer graphics, where obstacles are extracted as nodes and their relationships are built as edges. Three contributions are presented. 1) By assembling directed detours formed by nodes and segmented paths formed by edges, a generalized path consisting of nodes and edges derives various normal paths efficiently. 2) By multiplying two vectors starting from the obstacle point closest to the waypoint and the boundary point farthest from the waypoint, an novel obstacle gradient is introduced to guide safer optimization. 3) By assigning edges with asymmetric Gaussian model, a trajectory evaluation strategy is designed to reflect the motion tendency and motion uncertainty of dynamic obstacles. Qualitative and quantitative simulations demonstrate that the proposed GraphicTEB achieves spatial completeness, higher scene pass rate, and fastest computing efficiency. Experiments are implemented in long corridor and broad room scenarios, where the robot goes through gaps safely, finds trajectories quickly, and passes pedestrians politely.
Type
Publication
IEEE Transactions on Automation Science and Engineering(TASE)