About Me
Qianyi Zhang is a PH.D. student at Institute of Robotics and Automatic Information System of Nankai University, China (Service Robot Lab), and also a visiting PH.D. student of the Department of Computer Science of University College London (Robot Perception and Learning Lab). Recent works have been published on T-ASE, R-AL, ICRA(2023,2024,2025), IROS(2022), etc.
Interests
- Motion planning of mobile robots
- Decision of autonomous vehicles
- Human-robot game theory
- RL-based risk-aware navigation
- Vision language navigation
Education
PhD in Artificial Intelligence
Nankai University
Visiting PhD in Robotics Institute
University College London
BSc in Automation System
Nankai University
Experience
Motion planning algorithm intern
HuaweiFor the motion planning of unmanned delivery vehicles in complex dynamic environments, an optimization-based navigation approach, GA-TEB, has been published on ICRA2025, and a RL-based navigation approach, NavG, has been submitted on IROS2025.Decision-making algorithm intern
MeituanFor the decision-making of unmanned delivery vehicles in narrow roads, prediction and planning are combined to propose an explorative game theory. The related work was published on IROS2022 and deployed to real vehicles.
Education
PhD in Artificial Intelligence
Nankai UniversityVisiting PhD in Robotics Institute
University College LondonBSc in Automation System
Nankai University
Featured Publications

Recent Publications
(2025).
GA-TEB: Goal-Adaptive Framework for Efficient Navigation Based on Goal Lines.
In ICRA2025.
(2025).
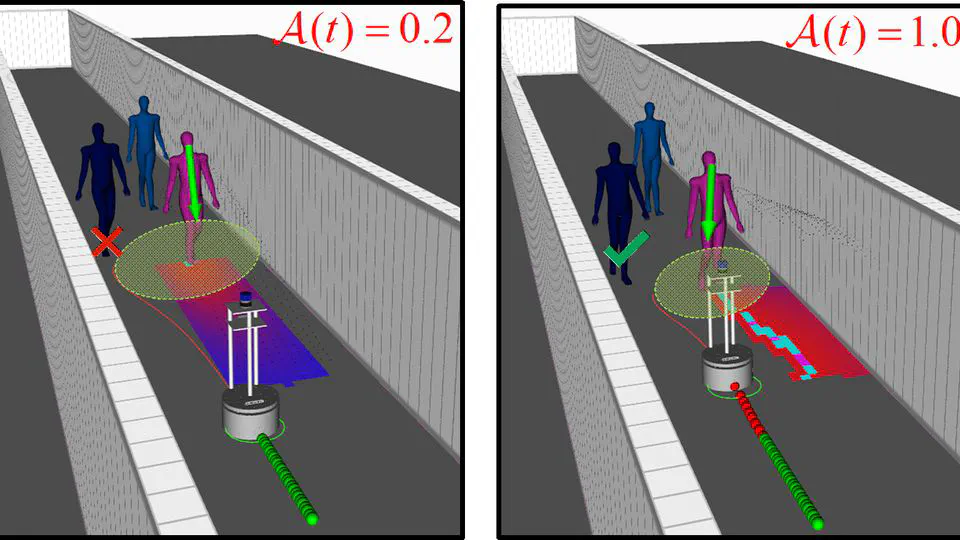
NavG: Risk-Aware Navigation in Crowded Environments Based on Reinforcement Learning with Guidance Points.
In IROS2025, under review.
(2024).
STC-TEB: Spatial-Temporally Complete Trajectory Generation Based on Incremental Optimization.
IEEE Robotics and Automation Letters(RAL).
(2024).
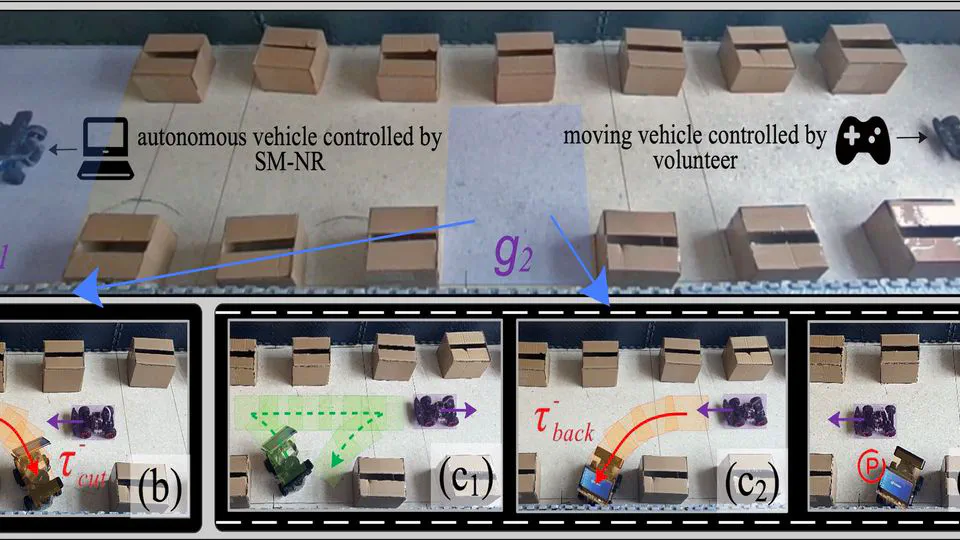
SM-NR: Scene Modeling of Autonomous Vehicles Avoiding Stationary and Moving Objects on Narrow Roads.
IEEE Transactions on Systems, Man and Cybernetics: Systems(SMCA, under review).
(2023).
CG3: The Human Gaze Helps Robots Run Bravely and Efficiently in Crowds.
In ICRA2023.